Connecting to Our BLE Server Using nRF Connect Mobile App
Once you flash the code to the ESP32, open the nRF Connect mobile app.
Scan for the Bluetooth name we set (mine is “implRust”) and connect to it.
The app will show the supported service and characteristics. Tap the down arrow under a characteristic to read data and the up arrow to write data. If you send(i.e write) data, you will see it in the system console.
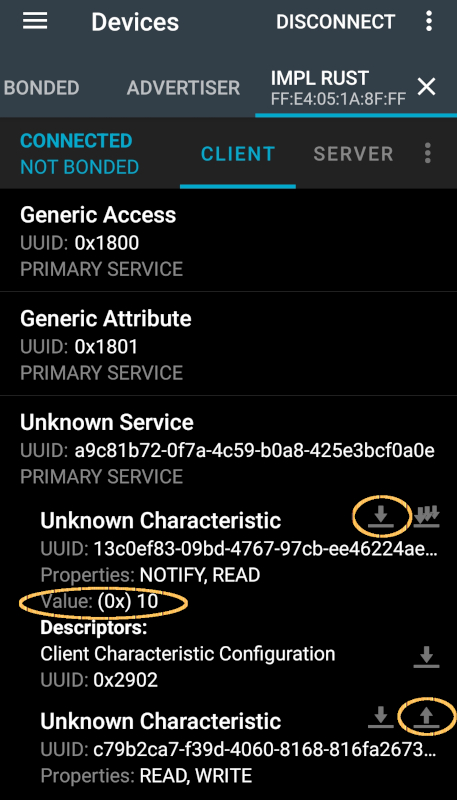
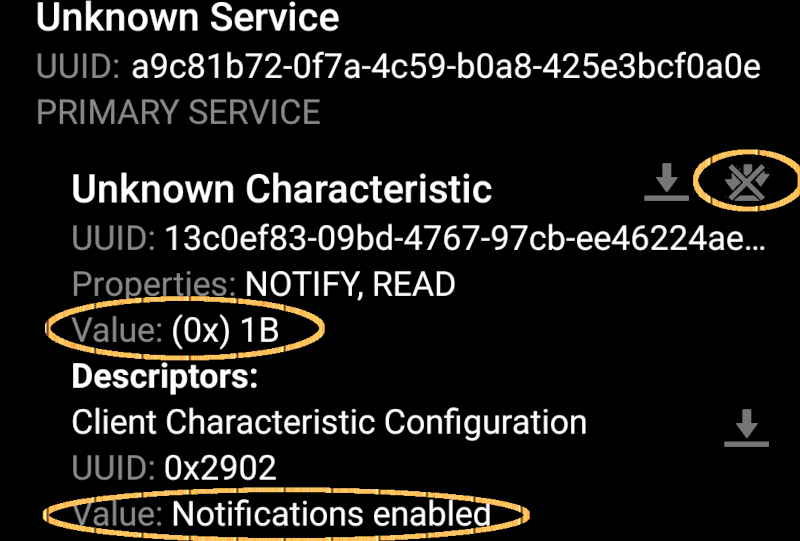
Tap the icon with three down arrow under a characteristic to subscribe for the notification and observe the value change.
Clone the existing project
You can clone (or refer) project I created and navigate to the bluetooth-low-energy folder.
git clone https://github.com/ImplFerris/esp32-projects
cd esp32-projects/bluetooth-low-energy/
The Full code of the ble module
#![allow(unused)]
fn main() {
use defmt::{info, warn};
use embassy_futures::join::join;
use embassy_futures::select::select;
use embassy_time::Timer;
// BLE:
use trouble_host::prelude::*;
/// Max number of connections
const CONNECTIONS_MAX: usize = 1;
/// Max number of L2CAP channels.
const L2CAP_CHANNELS_MAX: usize = 1;
// GATT Server definition
#[gatt_server]
struct Server {
sensor_service: SensorService,
}
/// Battery service
#[gatt_service(uuid = "a9c81b72-0f7a-4c59-b0a8-425e3bcf0a0e")]
struct SensorService {
#[characteristic(uuid = "13c0ef83-09bd-4767-97cb-ee46224ae6db", read, notify)]
sensor_data: u8,
#[characteristic(uuid = "c79b2ca7-f39d-4060-8168-816fa26737b7", write, read)]
sensor_settings: bool,
}
/// Run the BLE stack.
pub async fn run<C>(controller: C)
where
C: Controller,
{
// Using a fixed "random" address can be useful for testing. In real scenarios, one would
// use e.g. the MAC 6 byte array as the address (how to get that varies by the platform).
let address: Address = Address::random([0xff, 0x8f, 0x1a, 0x05, 0xe4, 0xff]);
info!("Our address = {:?}", address);
let mut resources: HostResources<DefaultPacketPool, CONNECTIONS_MAX, L2CAP_CHANNELS_MAX> =
HostResources::new();
let stack = trouble_host::new(controller, &mut resources).set_random_address(address);
let Host {
mut peripheral,
runner,
..
} = stack.build();
info!("Starting advertising and GATT service");
let server = Server::new_with_config(GapConfig::Peripheral(PeripheralConfig {
name: "implRust",
appearance: &appearance::power_device::GENERIC_POWER_DEVICE,
}))
.unwrap();
let _ = join(ble_task(runner), async {
loop {
match advertise("impl Rust", &mut peripheral, &server).await {
Ok(conn) => {
// set up tasks when the connection is established to a central, so they don't run when no one is connected.
let a = gatt_events_task(&server, &conn);
let b = custom_task(&server, &conn, &stack);
// run until any task ends (usually because the connection has been closed),
// then return to advertising state.
select(a, b).await;
}
Err(e) => {
let e = defmt::Debug2Format(&e);
panic!("[adv] error: {:?}", e);
}
}
}
})
.await;
}
/// This is a background task that is required to run forever alongside any other BLE tasks.
///
/// ## Alternative
///
/// If you didn't require this to be generic for your application, you could statically spawn this with i.e.
///
/// ```rust,ignore
///
/// #[embassy_executor::task]
/// async fn ble_task(mut runner: Runner<'static, SoftdeviceController<'static>>) {
/// runner.run().await;
/// }
///
/// spawner.must_spawn(ble_task(runner));
/// ```
async fn ble_task<C: Controller, P: PacketPool>(mut runner: Runner<'_, C, P>) {
loop {
if let Err(e) = runner.run().await {
let e = defmt::Debug2Format(&e);
panic!("[ble_task] error: {:?}", e);
}
}
}
/// Stream Events until the connection closes.
///
/// This function will handle the GATT events and process them.
/// This is how we interact with read and write requests.
async fn gatt_events_task<P: PacketPool>(
server: &Server<'_>,
conn: &GattConnection<'_, '_, P>,
) -> Result<(), Error> {
let sensor_data = server.sensor_service.sensor_data;
let reason = loop {
match conn.next().await {
GattConnectionEvent::Disconnected { reason } => break reason,
GattConnectionEvent::Gatt { event } => {
match &event {
GattEvent::Read(event) => {
if event.handle() == sensor_data.handle {
let value = server.get(&sensor_data);
info!(
"[gatt] Read Event to Sensor Data Characteristic: {:?}",
value
);
}
}
GattEvent::Write(event) => {
if event.handle() == sensor_data.handle {
info!(
"[gatt] Write Event to Sensor Data Characteristic: {:?}",
event.data()
);
}
}
_ => {}
};
// This step is also performed at drop(), but writing it explicitly is necessary
// in order to ensure reply is sent.
match event.accept() {
Ok(reply) => reply.send().await,
Err(e) => warn!("[gatt] error sending response: {:?}", e),
};
}
_ => {} // ignore other Gatt Connection Events
}
};
info!("[gatt] disconnected: {:?}", reason);
Ok(())
}
/// Create an advertiser to use to connect to a BLE Central, and wait for it to connect.
async fn advertise<'values, 'server, C: Controller>(
name: &'values str,
peripheral: &mut Peripheral<'values, C, DefaultPacketPool>,
server: &'server Server<'values>,
) -> Result<GattConnection<'values, 'server, DefaultPacketPool>, BleHostError<C::Error>> {
let mut advertiser_data = [0; 31];
let len = AdStructure::encode_slice(
&[
AdStructure::Flags(LE_GENERAL_DISCOVERABLE | BR_EDR_NOT_SUPPORTED),
AdStructure::CompleteLocalName(name.as_bytes()),
],
&mut advertiser_data[..],
)?;
let advertiser = peripheral
.advertise(
&Default::default(),
Advertisement::ConnectableScannableUndirected {
adv_data: &advertiser_data[..len],
scan_data: &[],
},
)
.await?;
info!("[adv] advertising");
let conn = advertiser.accept().await?.with_attribute_server(server)?;
info!("[adv] connection established");
Ok(conn)
}
/// Example task to use the BLE notifier interface.
/// This task will notify the connected central of a counter value every 2 seconds.
/// It will also read the RSSI value every 2 seconds.
/// and will stop when the connection is closed by the central or an error occurs.
async fn custom_task<C: Controller, P: PacketPool>(
server: &Server<'_>,
conn: &GattConnection<'_, '_, P>,
stack: &Stack<'_, C, P>,
) {
let mut tick: u8 = 0;
let sensor_data = server.sensor_service.sensor_data;
loop {
tick = tick.wrapping_add(1);
info!("[custom_task] notifying connection of tick {}", tick);
if sensor_data.notify(conn, &tick).await.is_err() {
info!("[custom_task] error notifying connection");
break;
};
// read RSSI (Received Signal Strength Indicator) of the connection.
if let Ok(rssi) = conn.raw().rssi(stack).await {
info!("[custom_task] RSSI: {:?}", rssi);
} else {
info!("[custom_task] error getting RSSI");
break;
};
Timer::after_secs(2).await;
}
}
}